| |
Основы техники вождения
Автор перевода: Владислав Ярополов.
Первый вопрос, который мы задаем себе, когда собираемся водить автомодель, это: "Как мне совершить поворот?". Многие уже знают, как сделать это, но некоторые еще не знают, поэтому...
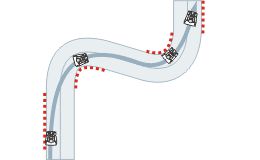
Главная идея совершения поворота состоит в том, чтобы сделать траекторию настолько прямой, насколько это возможно. Это называется "апекс поворота" или "траектория поворота". Посмотрите на траекторию, обозначенную голубой линией.
Следующим пунктом обсуждения являются точки начала торможения и ускорения.
Вам необходимо тормозить перед началом поворота. Если вы тормозите после поворота рулевого колеса, вас закрутит. Не тормозите, когда вы уже внутри поворота.
Теперь поговорим о ускорении. Когда вы находитесь в точке касания (ближайшая возможная точка от внутренней середины поворота), начните нажимать на газ. Истина состоит в том, что вы можете нажимать на газ, когда чувствуете, что все в порядке. Когда вы чувствуете, что автомодель может двигаться быстрее без заноса, жмите на газ!
Это просто требует тренировок. Вы должны чувствовать, где находится предел вашей автомодели!
Далее мы рассмотрим траектории движения в различных типах поворотов, которые могут встретиться вам на трассе.
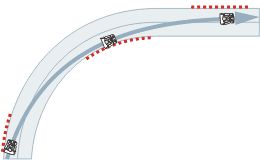
Быстрый поворот (Fast Corner)
Редко можно найти трассу, которая не включает такой тип поворотов. На иллюстрации, модель входит в поворот, проходит апекс и сохраняет линию движения на протяжении всего поворота. Весь процесс должен быть плавным, без внезапных движений рулевого колеса. Линия движения постоянного максимального радиуса является наиболее эффективной, так как поворот проходится на максимальной скорости без изменения газа на выходе из поворота.
Узкая шпилька (Tight Hairpin)
Для узкой шпильки, водитель намеренно входит в поворот с запозданием, продолжая двигаться к внешней стороне изгиба для создания максимально широкого угла. Таким образом, он может рассматривать остаток поворота, как быстрый поворот. Конечно, его намерение должно быть реализовано максимально быстро на выходе из шпильки. В известной степени, для того чтобы достичь этого, он должен "пожертвовать" фазой входа в поворот, входя в поворот довольно круто. Как только пройден апекс, водитель, который фактически преобразовал фазу выхода в быстрый поворот, уже может начать ускоряться.
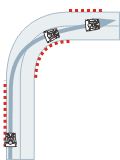
Правый поворот (Right-Angle Turn)
Для этого типа поворота, траектория поворота очень сильно зависит от того, что следует за поворотом. Траектория, которая продвигает среднюю фазу, проиллюстрирована на правом рисунке. Этот водитель входит в поворот и проходит апекс относительно поздно, для того чтобы получить чистую траекторию выхода для ускорения сразу при достижении апекса.
Слева проиллюстрирована траектория с постоянным максимальным радиусом. Водитель входит в поворот намного раньше и достигает апекса быстрее, но не может ускоряться до тех пор, пока не пройдет апекс. Эта траектория поворота более плавная на входе и, так как торможение может осуществляться позднее, этот метод благоприятствует обгону на входе в поворот.
Двойной апекс (Double Apex)
Иногда можно найти траекторию, которая позволит водителю сделать один поворот из двух, если два изгиба соединены короткой прямой. Траектория выхода из первого поворота становится линией входа для второго. Водитель не использует всю ширину трассы, чтобы чрезмерно не стеснять весь поворот в целом. Автомодель находит идеальную кривую, оставаясь в пределах двух третей ширины трассы.
После первого апекса, автомодель настроена на второй без необходимости делать любые коррекции курса. Когда два изгиба соединены короткой прямой, как изображено выше, не всегда возможно придерживаться траектории, описанной выше. Иногда будет более эффективно сделать изгиб в стороне от первого апекса и нацелиться на апекс второго поворота.
Раскрывающийся поворот (Opening Corner, с увеличивающимся радиусом)
Угол этого поворота после апекса постепенно увеличивается. Водитель входит в поворот и нацеливается на ранний апекс, поскольку он знает, что впоследствии, поворот открывается в тот самый момент, когда он захочет переместиться на внешнюю сторону поворота. Трудность состоит в нахождении золотой середины между точками входа и выхода относительно увеличивающегося радиуса поворота. Заключительная фаза поворота может рассматриваться как прямая, и водитель может начать ускоряться.
Сужающийся поворот (Tightening Corner, с уменьшающимся радиусом)
В этой ситуации лучше идти по широкой траектории на входе в поворот и подходить к апексу относительно поздно. Если перед поворотом есть длинная прямая, то возможно отложить точку входа и начало торможения, чтобы максимально использовать те несколько метров, когда автомодель идет на максимальной скорости. Преимущество в терминах скорости в повороте определенно будет больше.
Серии изгибов
Чтобы завершить обсуждение по теме траектории прохождения поворота, мы перейдем к случаям серии изгибов, не прерываемой прямыми участками. В таких обстоятельствах, теории, обсужденные в предыдущих случаях, также идеально работают, но необходимо добавить новый принцип - "последний изгиб всегда имеет приоритет". В этих случаях вы должны пожертвовать первым изгибом ради второго, так как, как мы уже видели, преимущество или потеря связаны с выходом из поворота и длиной последующего прямого участка.
Например, в случае шиканы, закачивающейся длинным прямым участком, будет необходимо пожертвовать выходом из первой секции, чтобы оказаться в лучшем положении для входа во вторую и последнюю часть поворота. Таким образом, мы потеряем что-то в начале, чтобы выйти из второй половины с большей скоростью.
В противоположной ситуации, когда мы имеем длинный прямой участок перед двумя или более изгибами, мы не можем пожертвовать первым изгибом ради последующих, из-за высоких скоростей потеря времени будет слишком большой. Таким образом, вы должны начать торможение как можно позднее и поддерживать максимально широкую траекторию в первом изгибе, зная, что потеря времени, которую вы получите в конце прямого участка следующего за изгибами, будет меньше, чем преимущество, заработанное при прохождении первого изгиба с максимальной скоростью.
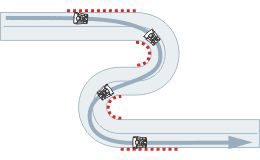
Эта иллюстрация показывает применение этих правил. Траектория планируется так, чтобы достигнуть наилучшего выхода из второй шпильки. Это означает широкий вход в первый изгиб, чтобы оказаться в лучшем положении для прохождения второго изгиба. Хотя мы пожертвовали первым изгибом и увеличили время его прохождения, это позволяет раньше начать ускорение и достигнуть последующего прямого участка на более высокой скорости. Как вы можете видеть, старое правило "Медленно-вошел и Быстро-вышел" по-прежнему действует.
Это шикана с выходом, который должен иметь приоритет, так как это быстрый изгиб. Водитель жертвует правым изгибом, подходя к обочине очень поздно - таким образом, он оказывается в положении для атаки следующего левого изгиба на более высокой скорости.
В этом случае, с другой стороны, вы должны дать приоритет первой части шиканы, так как это первый изгиб, который является быстрым, а второй изгиб более медленный. Водитель будет держать прямую линию до второго апекса, поддерживая максимально возможную скорость. Вы должны затормозить непосредственно перед вторым изгибом, который будет связан с менее благоприятной траекторией.
При взятии этой шиканы, водитель должен пожертвовать входом, чтобы выйти быстрее. Этот стиль движения диктуется длиной прямых участков перед и после шиканы, а не расположением изгибов. Это иллюстрация примера, когда после шиканы следует длинный прямой участок.
В этом случае мы видим шикану, которая следует после длинного прямого участка. В этом случае водитель должен пожертвовать второй половиной шиканы, чтобы тормозить как можно позднее и таким образом удлинить прямой участок. При этом он подойдет к левому изгибу возле внутренней обочины, и на выходе он должен будет ждать выравнивания автомодели прежде, чем сможет начать ускоряться.
Контроль автомодели на пределе
Мы переходим к следующей теме с обсуждением контроля автомодели на пределе. Существует два средства для контроля автомоделью: рулевое управление и газ. Первое контролирует переднюю часть автомодели, а второе контролирует заднюю часть автомодели. Чтобы эффективно описать, что должен делать водитель, мы разделим повороты на две фундаментальные группы: быстрые и медленные.
Медленные повороты
Для этого типа поворотов, лучше иметь автомодель с избыточной поворачиваемостью, т.е. автомодель, которая больше скользит сзади, чем спереди. Это будет проворная автомодель, поворачивающая вокруг себя, и это также более эффективно. Поворачивая больше, чем радиус поворота, она достигнет выхода более быстро, что экономит время.
Чем медленнее поворот, тем точнее вы должны управлять автомоделью. Поворачивая автомодель по правильной траектории, вы должны быть быстрыми и точными без избыточных движений, повернете слишком много и вы достигнете противоположного эффекта относительно желаемого. Затем, водитель должен выждать перед ускорением, чтобы задние колеса не зацепились слишком рано. Вы входите в этот тип поворота с торможением. В этот момент задние колеса обладают минимальным сцеплением, что делает автомодель все более подвижной при входе в поворот. Затем автомодель начинает все больше переруливать до тех пор, пока водитель не почувствует, что пора восстановить контроль. Вы делаете это с помощью газа:
- Если вы используете большой газ в длинном повороте, вы сможете удерживать скольжение на разумной дистанции.
- Если вы примените небольшой газ, или это короткий поворот, вы сможете сбалансировать автомодель и остановить скольжение, таким образом восстанавливая сцепление на задних колесах.
В то же самое время, вы возвращаете передние колеса обратно в игру. Если этого недостаточно, вы можете использовать контрруление - т.е. поворачиваете в направлении обратном направлению поворота - для восстановления баланса и возвращения контроля. Контрруление требует чрезвычайно быстрых и точных движений.
Может случиться, что вы перестарались с рулевым управлением в такой момент, или что вы ждали слишком долго перед тем, как выправить передние колеса. Это обычная ошибка, совершаемая новичками, и она приводит к тому, что автомодель вылетает на противоположную сторону трассы, переруливая в противоположном направлении. Этот эффект более острый, чем оригинальная избыточная поворачиваемость, и таким образом намного более труден в корректировке, так как передние колеса внезапно оказываются в контррулении в неверном направлении.
Таким образом, необходимо сразу выпрямить передние колеса, как только вы исправили избыточную поворачиваемость. Должно быть подчеркнуто, что сильная избыточная поворачиваемость может потребовать удвоить коррекции управления, и что идеальный контроль будет возвращен, как только автомодель вернется к полной стабильности на последующем прямом участке.
Быстрые повороты
В быстрых поворотах используется полная противоположность описанному выше. Необходимо, чтобы автомодели не имела избыточной поворачиваемости, по двум причинам:
- Очень трудно поймать скольжение.
- Если вы слишком теряете в скорости, это стоит времени.
Избыточная поворачиваемость, полезный актив в медленных поворотах, является затратной в более быстрых поворотах. Достигнув предела сцепления, в таких случаях автомодели лучше иметь небольшую недостаточную поворачиваемость.
При входе в поворот требуется небольшое воздействие на рулевое управление, так вы быстрее пройдете поворот. Водитель должен следовать по траектории, прямо через поворот, он должен пытаться пройти по идеальной траектории. Для сохранения баланса автомодели, вы не должны входить в поворот с торможением, избыточная поворачиваемость, которая вам требовалась для прохождения медленных поворотов, здесь усилена высокой скоростью, и автомодель может занести. Водитель должен постоянно поддерживать газ, это не означает, что нужно давать полный газ, просто вы должны избегать входа в быстрый поворот с замедлением.
После торможения на предшествующем прямом участке, вы должны снова дать газ перед входом в поворот, т.е. непосредственно перед точкой входа. Задние колеса восстановят сцепление, и все колеса в целом получат полное сцепление. Автомодель "прилипнет" к земле, а первым компонентом, который достигнет своего предела сцепления, станут передние колеса. Результирующая небольшая недостаточная поворачиваемость обеспечит автомодели стабильность в быстрых поворотах и, так как передние колеса обладают лишь небольшим углом дрейфа, это не нанесет ущерба скорости. Если присутствует слишком большая недостаточная поворачиваемость, это может быть исправлено с помощью газа: немного сбросив газ, можно уменьшить величину недостаточной поворачиваемости; резкий сброс газа на мгновение снизит сцепление задних колес в пользу передних колес. Торможение в течение длительного периода может вызвать нестабильность, и автомодель, которая несколько мгновений назад испытывала недостаточную поворачиваемость, может внезапно перейти в состояние избыточной поворачиваемости.
В заключение, избыточной поворачиваемостью в крутых поворотах можно управлять с помощью быстрого применения контрруления, в то время как недостаточная поворачиваемость в быстрых поворотах может регулироваться с помощью управления газом.
Вернуться к списку Обсудить на форуме
| |