|
Руководство по настройке автомодели
По материалам: M-Racing (RC-setup.com)
Автор перевода: Владислав Ярополов.
Это руководство предназначено для ознакомления с некоторыми концепциями и разъясняет, как различные настройки влияют на управляемость вашей автомодели. Мы надеемся, что это руководство будет полезным для начинающих и опытных водителей.
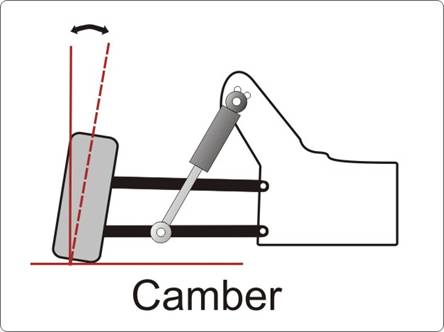
Угол развала (Camber)
Колесо с отрицательным углом развала.
Угол развала - это угол между вертикальной осью колеса и вертикальной осью автомодели, когда вы смотрите спереди или сзади автомодели. Если верхняя часть колеса находится дальше наружу, чем нижняя часть колеса, это называется положительным развалом. Если нижняя часть колеса находится дальше наружу, чем верхняя часть колеса, это называется отрицательным развалом.
Угол развала влияет на характеристики управляемости автомодели. В качестве основного правила, увеличение отрицательного развала улучшает сцепление на этом колесе при прохождении поворота (в определенных пределах). Это происходит потому, что это дает нам шину с лучшим распределением сил, возникающих в повороте, более оптимальный угол по отношению к дороге, увеличивающий пятно контакта и передающий силы через вертикальную плоскость шины, а не через поперечную силу через шину. Другой причиной использования отрицательного развала является тенденция резиновой шины перекатываться относительно себя при прохождении поворота. Если колесо обладает нулевым развалом, внутренний край пятна контакта шины начинает подниматься с земли, таким образом снижая площадь пятна контакта. Путем использования отрицательного развала, этот эффект снижается, таким образом максимизируя пятно контакта шины.
С другой стороны, для максимальной величины ускорения на прямом участке, максимальное сцепление будет получено, когда угол развала равен нулю и протектор шины параллелен дороге. Правильное распределение угла развала является главным фактором в конструкции подвески, и должно включать в себя не только идеализированную геометрическую модель, но и реальное поведение компонентов подвески: изгиб, искажение, эластичность и т.п.
Большинство автомоделей обладают некоторой формой подвески с двумя рычагами подвески, что позволяет вам регулировать угол развала (а также прирост развала).
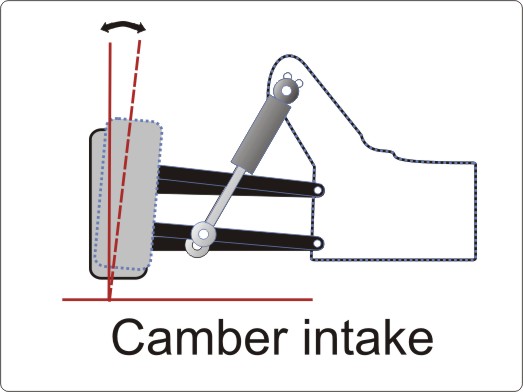
Прирост развала (Camber Intake)
Прирост развала является мерой того, как изменяется угол развала при сжатии подвески. Это определяется длиной рычагов подвески и углом между верхним и нижним рычагами подвески. Если верхний и нижний рычаги подвески являются параллельными, развал не будет изменяться при сжатии подвески. Если угол между рычагами подвески составляет значительную величину, развал будет увеличиваться при сжатии подвески.
Определенная величина прироста развала является полезной для поддержания поверхности шины параллельной поверхности земли, когда автомодель накреняется в повороте.
Примечание: рычаги подвески должны быть или параллельны, или должны быть ближе к друг к другу на внутренней стороне (стороне автомодели), чем со стороны колес. Наличие рычагов подвески, которые ближе друг к другу на стороне колес, а не на стороне автомодели, будет приводить к радикальному изменению углов развала (автомодель будет вести себя изменчиво).
Прирост развала будет определять, как ведет себя центр крена автомодели. Центр крена автомодели в свою очередь определяет, как будет происходить перенос веса при прохождении поворотов, а это оказывает существенное влияние на управляемость (более подробно об этом смотрите далее).
Угол кастера (Caster Angle)
Угол кастера (или кастора) является угловым отклонением от вертикальной оси подвеса колеса в автомодели, измеряемом в продольном направлении (угол поворотной оси колеса, если смотреть сбоку автомодели). Это угол между линией шарниров (в автомодели - воображаемая линия, которая проходит через центр верхней шаровой опоры к центру нижней шаровой опоры) и вертикалью. Угол кастера может быть отрегулирован для оптимизации управляемости автомодели в определенных ситуациях вождения.
Шарнирные точки поворота колеса наклонены таким образом, что линия, проведенная через них, пересекает поверхность дороги немного спереди точки контакта колеса. Целью этого является обеспечение некоторой степени самоцентрируемости рулевого управления - колесо катится позади оси поворота колеса. Это облегчает управление автомоделью и улучшает ее стабильность на прямых участках (снижая тенденцию к отклонению от траектории). Избыточный угол кастера сделает управление более тяжелым и менее отзывчивым, тем не менее, во внедорожных соревнованиях, большие углы кастера используются для улучшения прироста развала при прохождении поворотов.
Схождение (Toe-In) и расхождение (Toe-Out)
Схождение - это симметричный угол, который каждое колесо составляет с продольной осью автомодели. Схождение - это когда передняя часть колес направлена в сторону центральной оси автомодели.
Передний угол схождения
В основном, увеличенное схождение (передние части колес находятся ближе к друг другу, чем задние части колес) обеспечивает большую стабильность на прямых участках ценой некоторой медлительности отклика на поворот, а также немного увеличенным сопротивлением, так как колеса теперь идут немного боком.
Расхождение на передних колесах, приведет к более отзывчивому управлению и более быстрому входу в поворот. Однако, переднее расхождение обычно означает менее стабильную автомодель (более дерганную).
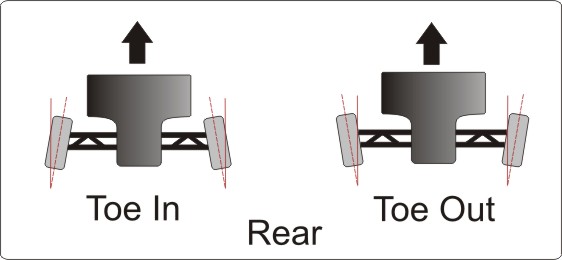
Задний угол схождения
Задние колеса вашей автомодели всегда должны быть отрегулированы с некоторой степенью схождения (хотя схождение в 0 градусов приемлемо в некоторых условиях). В основном, чем больше заднее схождение, тем более стабильной будет автомодель. Однако, имейте в виду, что увеличение угла схождения (спереди или сзади) будет приводить к снижению скорости на прямых участках (особенно при использовании стоковых моторов).
Еще одной связанной концепцией является то, что схождение, подходящее для прямого участка, не будет подходящим для поворота, так как внутреннее колесо должно идти по меньшему радиусу, чем внешнее колесо. Чтобы это компенсировать, тяги рулевого управления обычно более или менее соответствуют принципу Аккермана для рулевого управления, модифицированному для приспособления к характеристикам конкретной автомодели.
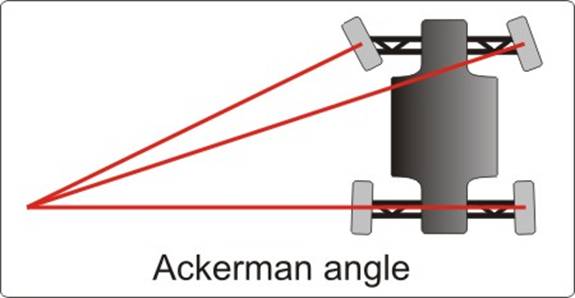
Угол Акермана
Принцип Аккермана в рулевом управлении - это геометрическое расположение рулевых тяг автомодели, сконструированное для решения проблемы необходимости следования внутренних и внешних колес в повороте по различным радиусам.
Когда автомодель поворачивает, она следует пути, который является частью его окружности поворота, центр которой находится где-то вдоль линии, проходящей через заднюю ось. Повернутые колеса должны быть наклонены так, чтобы они оба составляли угол в 90 градусов с линией проведенной из центра окружности через центр колеса. Поскольку колесо на внешней стороне поворота будет идти по большему радиусу, чем колесо на внутренней стороне поворота, оно должно быть повернуто на другой угол.
Принцип Аккермана в рулевом управлении автоматически урегулирует это путем перемещения рулевых шарниров внутрь так, чтобы он находились на линии, проведенной между осью поворота колеса и центром задней оси. Рулевые шарниры соединены жесткой тягой, которая в свою очередь является частью рулевого механизма. Такое расположение гарантирует, что при любом угле поворота, центры окружностей, по которым следуют колеса, будут находиться в одной общей точке.
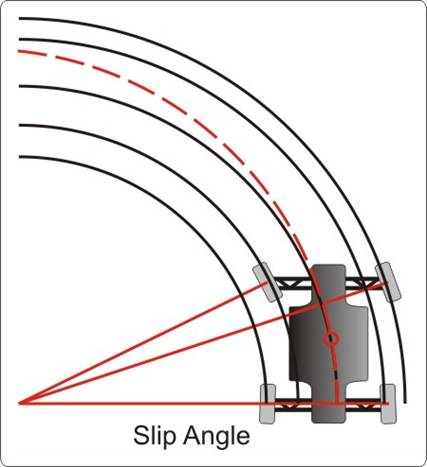
Угол бокового увода (Slip angle)
Угол бокового увода - это угол между реальной траекторией движения колеса и направлением, в которое оно указывает. Угол бокового увода приводит в результате к боковой силе перпендикулярной к направлению движения колеса - угловой силе. Эта угловая сила увеличивается примерно линейно первые несколько градусов угла бокового увода, а затем увеличивается нелинейно до максимума, после чего начинает уменьшаться (когда колесо начинает скользить).
Ненулевой угол бокового увода возникает вследствие деформации шины. Во время вращения колеса, сила трения между пятном контакта шины и дорогой приводит к тому, что индивидуальные "элементы" протектора (бесконечно малые участки протектора) остаются неподвижными относительно дороги.
Это отклонение шины приводит к росту угла бокового увода и угловой силы.
Так как силы, которые воздействуют на колеса от веса автомодели, распределяются неравномерно, угол бокового увода каждого колеса будет различным. Соотношение между углами бокового увода будет определять поведение автомодели в данном повороте. Если отношение переднего угла бокового увода к заднему углу бокового увода больше, чем 1:1, автомодель будет подвержена недостаточной поворачиваемости, а если отношение меньше, чем 1:1, то это будет способствовать избыточной поворачиваемости. Реальный мгновенный угол бокового увода зависит от многих факторов, включая состояние дорожного покрытия, но подвеска автомодели может быть сконструирована для обеспечения особых динамических характеристик.
Главным средством регулировки образующихся углов бокового увода является изменение относительного крена спереди-назад путем регулировки величины переднего и заднего бокового переноса веса. Это может быть достигнуто путем изменения высоты центров крена, или путем регулировки жесткости крена, с помощью изменения подвески или с помощью добавления стабилизаторов поперечной устойчивости.
Перенос веса (Weight Transfer)
Перенос веса относится к перераспределению веса, поддерживаемого каждым колесом во время воздействия ускорений (продольного и поперечного). Это включает ускорение, торможение или поворот. Понимание переноса веса является критическим для понимания динамики автомодели.
Перенос веса происходит, поскольку центр тяжести (CoG) смещается во время маневров автомодели. Ускорение вызывает вращение центра масс вокруг геометрической оси, приводя к смещению центра тяжести (CoG). Перенос веса спереди-назад пропорционален отношению высоты центра тяжести к колесной базе автомодели, а боковой перенос веса (в сумме спереди и сзади) пропорционален отношению высоты центра тяжести к колее автомодели, а также высоте его центра крена (разъясняется далее).
Например, когда автомодель ускоряется, ее вес переносится в сторону задних колес. Вы можете наблюдать это, так как автомодель заметно наклоняется назад, или "приседает". И наоборот, при торможении, вес переносится в сторону передних колес (нос "ныряет" к земле). Сходным образом, во время изменений в направлении (боковое ускорение), вес переносится к внешней стороне поворота.
Перенос веса вызывает изменение доступного сцепления на всех четырех колесах, когда автомодель тормозит, ускоряется или поворачивает. Например, так как при торможении происходит перенос веса вперед, передние колеса осуществляют основную "работу" торможения. Это смещение "работы" к одной паре колес от другой приводит к потере общего доступного сцепления.
Если боковой перенос веса достигает нагрузки колеса на одном из концов автомодели, внутреннее колесо на этом конце будет подниматься, вызывая изменение в характеристиках управления. Если этот перенос веса достигает половины веса автомодели, она начинает переворачиваться. Некоторые большие траки будут переворачиваться перед скольжением, а дорожные автомодели обычно переворачиваются только тогда, когда они сходят с дороги.
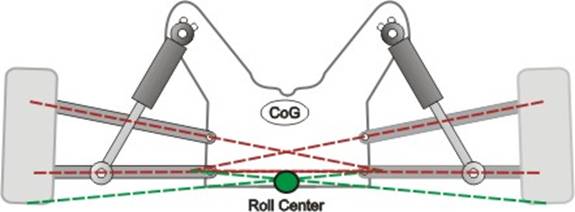
Центр крена (Roll center)
Центр крена автомодели является воображаемой точкой, отмечающей центр, вокруг которого происходит крен автомодели (в поворотах), если смотреть спереди (или сзади).
Положение геометрического центра крена диктуется исключительно геометрией подвески. Официальное определение центра крена звучит так: "Точка на поперечном сечении через любую пару центров колес, в которой боковые силы могут быть применены к подпружиненной массе без создания крена подвески".
Значение центра крена может быть оценено только в том случае, когда учитывается центр массы автомодели. Если есть различие между положениями центра масс и центра крена, то создается "плечо момента". Когда автомодель испытывает боковое ускорение в повороте, центр крена перемещается вверх или вниз, и размер плеча момента, объединенный с жесткостью пружин и стабилизаторов поперечной устойчивости, диктует величину крена в повороте.
Геометрический центр крена автомодели может быть найден с помощью следующих основных геометрических процедур, когда автомодель находится в статическом состоянии:
Проведите воображаемые линии параллельно рычагам подвески (красного цвета). Затем проведите воображаемые линии между точками пересечения красных линий и нижними центрами колес, как показано на рисунке (зеленого цвета). Точка пересечения этих зеленых линий является центром крена.
Вам необходимо отметить, что центр крена перемещается, когда подвеска сжимается или поднимается, поэтому в действительности это мгновенный центр крена. Насколько этот центр крена перемещается при сжатии подвески, определяется длиной рычагов подвески и углом между верхними и нижними рычагами подвески (или регулируемых тяг подвески).
При сжатии подвески, центр крена поднимается выше и плечо момента (расстояние между центром крена и центром тяжести автомодели (CoG на рисунке)) будет уменьшаться. Это будет означать, что при сжатии подвески (например, при прохождении поворота), автомодель будет иметь меньшую тенденцию крениться (что хорошо, если вы не хотите перевернуться).
Когда вы используете шины с высоким сцеплением (микропористая резина), вы должны установить рычаги подвески таким образом, чтобы центр крена значительно поднимался при сжатии подвески. Дорожные автомодели с ДВС обладают очень агрессивными углами рычагов подвески для поднятия центра крена при прохождении поворотов и предотвращения переворачивания при использовании шин из микропористой резины.
Использование параллельных, равной длины рычагов подвески, приводит к фиксированному центру крена. Это означает, что при наклоне автомодели, плечо момента будет принуждать автомодель крениться все больше и больше. В качестве основного правила, чем выше центр тяжести вашей автомодели, тем выше должен быть центр крена для того, чтобы избежать переворачиваний.
Паразитное подруливание на ухабах (Bump Steer)
"Bump Steer" - это тенденция колеса поворачивать, когда оно смещается вверх по ходу подвески. На большинстве автомоделей, передние колеса обычно испытывают расхождение (передняя часть колеса перемещается наружу), при сжатии подвески. Это обеспечивает недостаточную поворачиваемость при крене (когда вы сталкиваетесь с выступом при повороте, автомодель стремится выпрямиться). Избыточный "bump steer" увеличивает износ шин и на неровных трассах делает автомодель дерганной.
"Bump Steer" и центр крена
На ухабе, оба колеса поднимаются вместе. При крене, одно колесо поднимается, а другое опускается. Обычно это производит большее схождение на одном колесе и большее расхождение на другом колесе, таким образом обеспечивая эффект поворота. При простом анализе вы можете просто допустить, что подруливание при крене аналогично "bump steer", но на практике вещи подобные стабилизатору поперечной устойчивости оказывают влияние, которое это изменяет.
"Bump steer" может быть увеличен путем поднятия внешнего шарнира или опускания внутреннего шарнира. Обычно требуется небольшая регулировка.
Недостаточная поворачиваемость (Understeer)
Недостаточная поворачиваемость - условие управляемости автомодели в повороте, при котором круговой путь движения автомодели имеет заметно больший диаметр, чем у круга, обозначенного направлением колес. Этот эффект противоположен избыточной поворачиваемости (oversteer) и в простых словах недостаточная поворачиваемость является условием, в котором передние колеса не следуют по траектории, заданной водителем для прохождения поворота, а вместо этого следуют по более прямолинейной траектории.
Это еще часто называют выталкиванием или отказом поворачивать. Автомодель называют "зажатой", так как она стабильна и далека от тенденции к заносу.
Так же как с избыточной поворачиваемостью, недостаточная поворачиваемость имеет множество источников, таких как механическое сцепление, аэродинамика и подвеска.
Традиционно, недостаточная поворачиваемость имеет место, когда передние колеса имеют недостаточное сцепление во время поворота, таким образом передняя часть автомодели имеет меньшее механическое сцепление и не может следовать по траектории в повороте.
Углы развала, дорожный просвет и центр тяжести являются важными факторами, которые определяют условие недостаточной/избыточной поворачиваемости.
Является общим правилом, что производители сознательно настраивают автомодели для наличия небольшой недостаточной поворачиваемости. Если автомодель обладает небольшой недостаточной поворачиваемостью, она является более стабильной (в пределах средних способностей водителя), при резких изменениях направления движения.
Как отрегулировать вашу автомодель для снижения недостаточной поворачиваемости
Вы должны начать с увеличения отрицательного развала передних колес (никогда не превышайте угол в -3 градуса для дорожных автомоделей и 5-6 градусов для внедорожных автомоделей).
Другим способом снижения недостаточной поворачиваемости является снижение отрицательного развала задних колес (он всегда должен быть <=0 градусов).
Еще одним способом уменьшения недостаточной поворачиваемости является снижение жесткости или удаление переднего стабилизатора поперечной устойчивости (или увеличение жесткости заднего стабилизатора поперечной устойчивости).
Важно отметить, что любые регулировки являются предметом компромисса. Автомодель обладает ограниченной величиной общего сцепления, которое может быть распределено между передними и задними колесами.
Избыточная поворачиваемость (Oversteer)
Автомодель обладает избыточной поворачиваемостью, когда задние колеса не следуют позади передних колес, а вместо этого скользят в сторону внешней стороны поворота. Избыточная поворачиваемость может привести к заносу.
На тенденцию автомодели к избыточной поворачиваемости влияет несколько факторов, таких как механическое сцепление, аэродинамика, подвеска и стиль вождения.
Предел избыточной поворачиваемости наступает, когда задние шины превышают предел своего бокового сцепления во время поворота перед тем, как это происходит с передними шинами, таким образом вызывая ситуацию, когда задняя часть автомодели направлена в сторону внешней стороны поворота. В общем смысле избыточная поворачиваемость является условием, когда угол бокового увода задних шин превосходит угол бокового увода передних шин.
Автомодели с задним приводом более подвержены избыточной поворачиваемости, в особенности при использовании газа в тесных поворотах. Это происходит потому, что задние шины должны выдерживать боковые силы и тягу двигателя.
Тенденция автомодели к избыточной поворачиваемости обычно увеличивается при смягчении передней подвески или ужесточении задней подвески (или при добавлении заднего стабилизатора поперечной устойчивости). Углы развала, дорожный просвет и температурный класс шин также могут быть использованы для настройки баланса автомодели.
Автомодель с избыточной поворачиваемостью может еще называться "свободной" или "незажатой".
Как вы различаете избыточную и недостаточную поворачиваемость?
Когда вы входите в поворот, избыточная поворачиваемость - это когда автомодель поворачивает круче, чем вы ожидаете, а недостаточная поворачиваемость - это когда автомодель поворачивает меньше, чем вы ожидаете.
Обладать избыточной или недостаточной поворачиваемость, вот в чем вопрос
Как упоминалось ранее, любые регулировки являются предметом компромисса. Автомодель обладает ограниченным сцеплением, которое может быть распределено между передними и задними колесами (это может быть расширено с помощью аэродинамики, но это уже другая история).
Все спортивные автомодели развивают более высокую боковую (т.е. боковое скольжение) скорость, чем это определяется направлением, в которое указывают колеса. Различие между кругом, по которому катятся колеса, и направлением, в которое они указывают, является углом бокового увода (slip angle). Если углы бокового увода передних и задних колес являются одинаковыми, автомодель обладает нейтральным балансом управляемости. Если угол бокового увода передних колес превосходит угол бокового увода задних колес, говорят, что автомодель обладает недостаточной поворачиваемостью. Если угол бокового увода задних колес превосходит угол бокового увода передних колес, говорят, что автомодель обладает избыточной поворачиваемостью.
Просто запомните, что автомодель с недостаточной поворачиваемостью сталкивается с ограждением передней частью, автомодель с избыточной поворачиваемостью сталкивается с ограждением задней частью, а автомодель с нейтральной управляемостью касается ограждения обоими концами одновременно.
Другие важные факторы, которые следует учесть
Любая автомодель может испытывать недостаточную или избыточную поворачиваемость в зависимости от дорожных условий, скорости, доступного сцепления и действий водителя. Конструкция автомодели, однако, имеет тенденцию к индивидуальному "предельному" условию, когда автомодель достигает и превосходит пределы сцепления. "Предельная недостаточная поворачиваемость" относится к автомодели, которая благодаря конструктивным особенностям стремится к недостаточной поворачиваемости, когда угловые ускорения превосходят сцепление шин.
Предельный баланс управляемости является функцией переднего/заднего относительного сопротивления крену (жесткость подвески), переднего/заднего распределения веса и переднего/заднего сцепления шин. Автомодель с тяжелой передней частью и низким задним сопротивлением крену (из-за мягких пружин и/или малой жесткости, или отсутствия задних стабилизаторов поперечной устойчивости) будет обладать тенденцией к предельной недостаточной поворачиваемости: ее передние шины, будучи более тяжело нагружены даже в статическом состоянии, будут достигать пределов своего сцепления раньше, чем задние шины, и таким образом будут развивать большие углы бокового увода. Автомодели с передним приводом также подвержены недостаточной поворачиваемости, так как они обычно не только обладают тяжелой передней частью, но и подача мощности на передние колеса также снижает их сцепление доступное для поворота. Это часто приводит к эффекту "дрожания" на передних колесах, так как сцепление неожиданно изменяется вследствие передачи мощности от двигателя на дорогу и управления.
Хотя недостаточная и избыточная поворачиваемости обе могут вызывать потерю контроля, многие производители разрабатывают свои автомодели для предельной недостаточной поворачиваемости в предположении, что для среднего водителя это легче контролировать, чем предельную избыточную поворачиваемость. В отличие от предельной избыточной поворачиваемости, которая часто требует нескольких корректировок управления, недостаточная поворачиваемость часто может быть снижена с помощью понижения скорости.
Недостаточная поворачиваемость может проявляться не только во время ускорения в повороте, она также может проявиться во время резкого торможения. Если баланс тормозов (усилие торможения на передней и задней оси) слишком смещен вперед, это может вызвать недостаточную поворачиваемость. Это вызывается блокированием передних колес и потерей эффективного управления. Может иметь место и противоположный эффект, если баланс тормозов слишком смещен назад, то задний конец автомодели заносит.
Спортсмены, на асфальтовых поверхностях, в основном предпочитают нейтральный баланс (с небольшой тенденцией в сторону недостаточной или избыточной поворачиваемости, в зависимости от трассы и стиля вождения), так как недостаточная и избыточная поворачиваемость приводят к потерям скорости во время прохождения поворотов. В заднеприводных автомоделях недостаточная поворачиваемость в основном дает лучшие результаты, так как задние колеса нуждаются в некотором доступном сцеплении для ускорения автомодели на выходе из поворотов.
Жесткость пружин (Spring rate)
Жесткость пружин является инструментом для настройки дорожного просвета автомодели и ее положение в ходе подвески. Жесткость пружины - коэффициент, используемый для измерения величины сопротивления сжатию.
Пружины, которые являются слишком жесткими или слишком мягкими, фактически приведут к тому, что автомодель вовсе не будет иметь подвески.
Жесткость пружины, приведенная к колесу (Wheel rate)
Жесткость пружины, приведенная к колесу, является эффективной жесткостью пружины, когда она измеряется на колесе.
Жесткость пружины, приведенная к колесу, обычно равна или значительно меньше, чем жесткость самой пружины. Обычно, пружины крепятся на рычагах подвески или других деталях шарнирной системы подвески. Предположим, что при смещении колеса на 1 дюйм пружина смещается на 0,75 дюйма, соотношение рычага будет 0,75:1. Жесткость пружины, приведенная к колесу, вычисляется путем возведения в квадрат соотношения рычага (0,5625), умножения на жесткость пружины и на синус угла наклона пружины. Соотношение возводится в квадрат благодаря двум эффектам. Соотношение применяется к силе и проходимому расстоянию.
Ход подвески (Suspension Travel)
Ход подвески является расстоянием от нижней части хода подвески (когда автомодель находится на подставке и колеса свободно висят), до верхней части хода подвески (когда колеса автомодели больше не могут подниматься выше). Достижение колесом нижнего или верхнего предела может вызывать серьезные проблемы контроля. "Достижение предела" может быть вызвано выходом за пределы перемещения подвески, шасси и т.п. или касанием дороги корпусом или другими компонентами автомодели.
Демпфирование (Damping)
Демпфирование - это контроль движения или колебания с помощью использования гидравлических амортизаторов. Демпфирование контролирует скорость перемещения и сопротивление подвески автомодели. Автомодель без демпфирования будет совершать колебания вверх и вниз. С помощью подходящего демпфирования, автомодель будет возвращаться обратно в нормальное состояние за минимальное время. Демпфирование в современных автомоделях может контролироваться с помощью увеличения или уменьшения вязкости жидкости (или размера отверстий в поршне) в амортизаторах.
Анти-дайв и анти-скват (Anti-dive and Anti-squat)
Анти-дайв и анти-скват выражаются в процентах и относятся к нырку передней части автомодели при торможении и приседанию задней части автомодели при ускорении. Они могут считаться двойниками для торможения и ускорения, в то время как высота центра крена работает в поворотах. Основная причина их различия состоит в разных конструкторских целях для передней и задней подвески, тогда как подвеска обычно симметрична между правой и левой сторонами автомодели.
Процент анти-дайва и анти-сквата всегда вычисляется относительно вертикальной плоскости, которая пересекает центр тяжести автомодели. Сначала рассмотрим анти-скват. Определите место заднего мгновенного центра подвески, если смотреть на автомодель сбоку. Проведите линию от пятна контакта шины через мгновенный центр, это будет вектор силы колеса. Теперь проведите вертикальную линию через центр тяжести автомодели. Анти-скват является отношением между высотой точки пересечения вектора силы колеса и высотой центра тяжести, выраженным в процентах. Значение анти-сквата в 50% будет означать, что вектор силы при ускорении проходит посередине между землей и центром тяжести.
Анти-дайв является двойником анти-сквата и работает для передней подвески во время торможения.
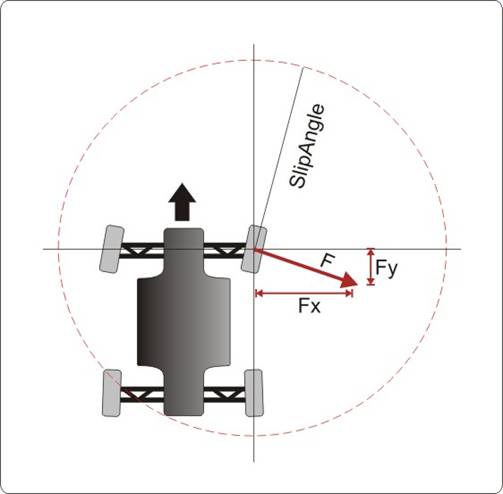
Круг сил (Circle of forces)
Круг сил является полезным способом думать о динамическом взаимодействии между шиной автомодели и поверхностью дороги. На диаграмме ниже мы смотрим на колесо сверху, так что поверхность дороги лежит в плоскости x-y. Автомодель, к которой присоединено колесо, перемещается в положительном y направлении.
В этом примере, автомодель будет поворачивать направо (т.е. положительное x направление направлено к центру поворота). Обратите внимание, что плоскость вращения колеса находится под углом к реальному направлению, в котором перемещается колесо (в положительном y направлении). Этот угол является углом бокового увода.
Предел величины F ограничен пунктирным кругом, F может быть любой комбинацией компонентов Fx (поворот) и Fy (ускорение или торможение), которая не превосходит пунктирного круга. Если комбинация сил Fx и Fy выходит за границы круга, шина теряет сцепление (вы скользите или вас заносит).
В этом примере, шина создает компонент силы в направлении x (Fx), которая, при передаче к шасси автомодели через систему подвески в комбинации со сходными силами от остальных колес, будет вызывать поворот автомодели направо. На диаметр круга сил и, следовательно, на максимальную горизонтальную силу, которую может создавать шина, влияет множество факторов, включая конструкцию шины и ее состояние (возраст и температурный диапазон), качество дорожной поверхности и вертикальная нагрузка на колесо.
Критическая скорость
Автомодель с недостаточной поворачивемостью обладает сопутствующим режимом нестабильности, называемым критической скоростью. При приближении к этой скорости управление становится все более чувствительным. На критической скорости скорость рыскания становится бесконечной, то есть, автомодель продолжает поворачивать даже при выпрямленных колесах. На скоростях выше критической простой анализ показывает, что угол поворота должен быть реверсирован (контр-руление). Автомодель с недостаточной поворачиваемостью этому не подвержена, это одна из причин, по которой высокоскоростные автомодели настраивают на недостаточную поворачиваемость.
Поиск золотой середины (или сбалансированная автомодель)
Автомодель, которая не страдает от избыточной или недостаточной поворачиваемости, когда она используется на своем пределе, обладает нейтральным балансом. Это кажется интуитивным, что спортсмены будут предпочитать небольшую избыточную поворачиваемость для вращения автомодели вокруг поворота, но это обычно не используется по двум причинам. Раннее ускорение, как только автомодель проходит апекс поворота, позволяет автомодели набрать дополнительную скорость на последующем прямом участке. Водитель, который ускоряется раньше или резче, имеет большое преимущество. Задним шинам требуется некоторое избыточное сцепление для ускорения автомодели в этой критической фазе поворота, в то время как передние шины могут посвятить все свое сцепления для поворота. Поэтому автомодель должна быть настроена с небольшой тенденцией к недостаточной поворачиваемости или должна быть немного "зажата". Также, автомодель с избыточной поворачиваемостью является дерганной, увеличивая вероятность потери контроля во время длительных соревнований или при реакции на неожиданную ситуацию.
Имейте в виду, что это применимо только для соревнований на дорожном покрытии. Соревнования на грунте это совсем другая история.
Некоторые успешные водители предпочитают небольшую избыточную поворачиваемость в своих автомоделях, предпочитая менее спокойную автомодель, которая легче входит в повороты. Необходимо отметить, что суждение о балансе управляемости автомодели не является объективным. Стиль вождения является главным фактором в видимом балансе автомодели. Поэтому два водителя с идентичными автомоделями часто используют их с различными настройками баланса. И оба могут называть баланс своих автомоделей "нейтральным".
Вернуться к списку Обсудить на форуме
|